
Conquest of the Moon - 1950s Astrogators
Conquest of the Moon (Viking Press, 1953, Wernher von Braun, Willy Ley, Fred Whipple) describes a lunar expedition that could be accomplished with the technology of 1950.
Von Braun and company left no detail unexamined. One of the less obvious categories that they put a lot of effort into is navigation, or in this context, astrogation.
The lunar expedition takes an odd cis-lunar orbit, in that it leaves from, and returns to, a space station in a high inclination earth orbit, one that’s perpendicular to the plane of the ecliptic.
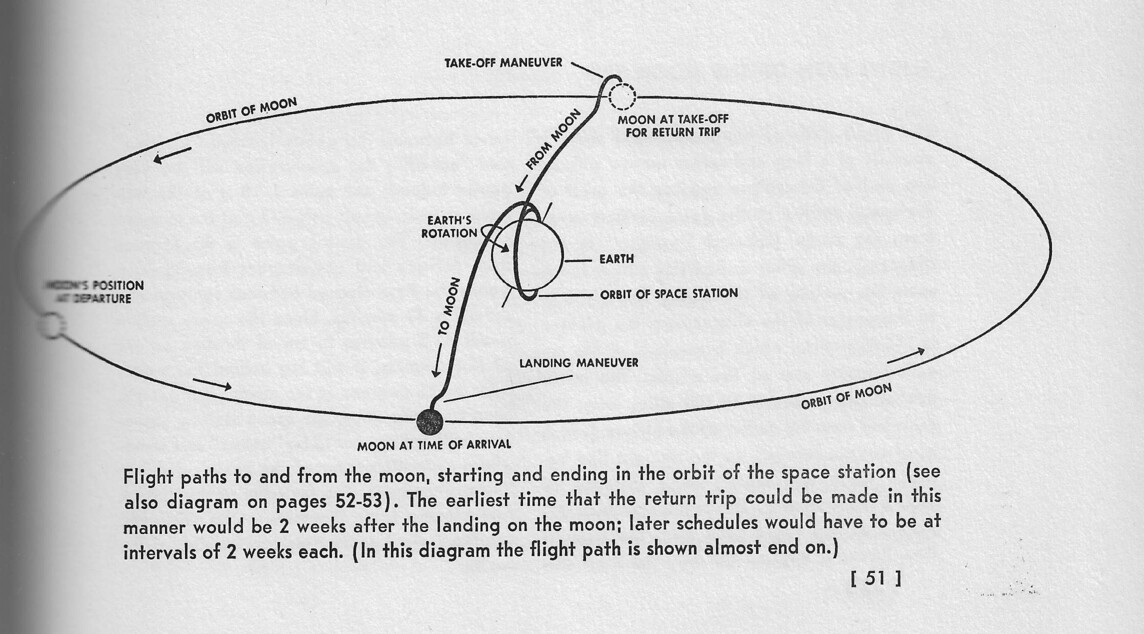
The high inclination orbit of the space station remains in a plane (orbits are gyroscopically stable), so this mandates lunar stays of odd multiples of approximately 2 weeks. I think it also requires significant out-of-plane acceleration of the moonships.
That’s interesting enough, but the cis-lunar orbit appears to be carefully calculated:
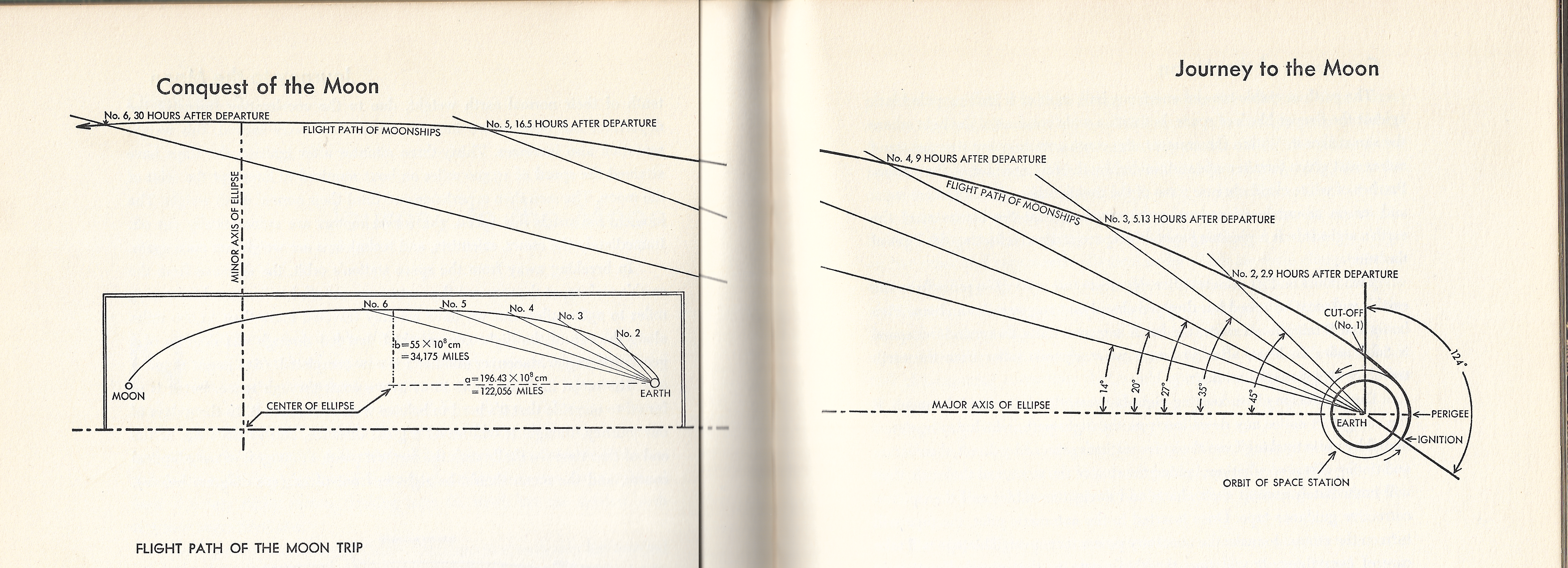
The image above is scans of two pages from my copy of Conquest of the Moon, which is why there’s a gray area in the middle.
I’ll veer a little off-course here. I first saw a copy of Conquest of the Moon in the main branch of the Denver Public Library, probably around 1995. I believe it had a foldout of the plan view of the cis-lunar orbit. I recall thinking that it was amazing this foldout had survived so long. My copy of Conquest of the Moon does not have any such foldout. I can only find 2 editions of the book, the 1953 Viking English edition, and a 1960 German paperback edition. Am I mis-remembering the DPL copy’s foldout?
As I looked at the orbit diagram, I puzzled over the angles that are noted so carefully. I finally realized that angles are the only thing someone with 1950 technology could measure in a space ship on its way to the moon.
Radar existed, the moonship autopilot used “radar altimeters” in the last few seconds of landing, but apparently range was limited. Von Braun also describes a form of radio based range finding, but relegates its use to ground stations, or on the space station. The equipment must have been bulky and heavy, remember that transistors were only demonstrated in 1947. They didn’t have lasers. Integrating accelerometers existed, but would only work when the moon ship was being accelerated, not in free fall. They could measure angles very accurately.
The key to space navigation is optically measuring angles.
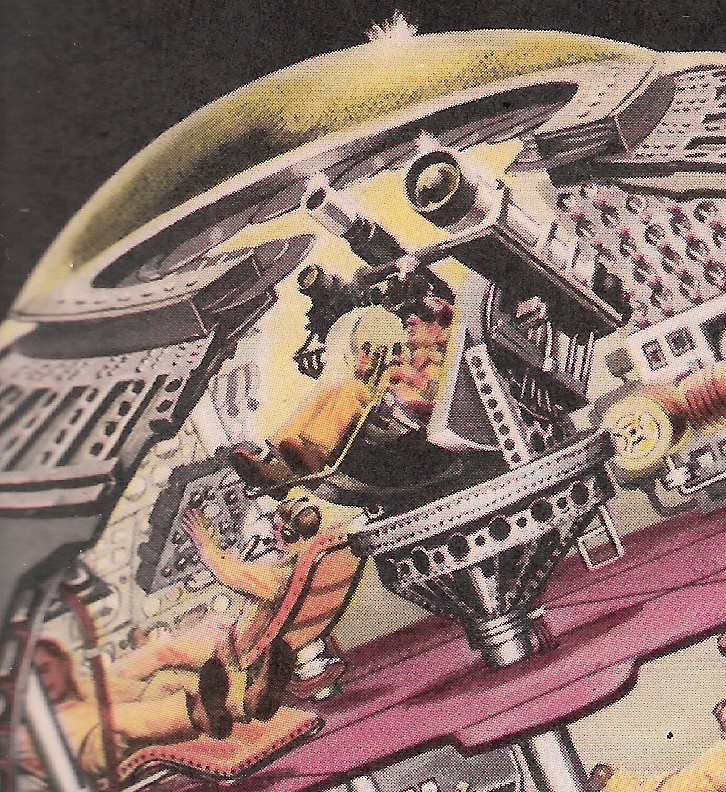
Above is a portion of the moonship’s crew sphere illustration, showing the astrogation platform. Someone told the artist that beam webs with flanged holes were used in flight hardware. That’s not just aesthetics, A lot of the time, an I-beam doesn’t carry all that much shear (load in-line with the web of the beam), a very thin web suffices to carry the load. Something like durability or ease of manufacture chooses the thickness of the web instead of strength or stiffness considerations. Putting holes in such a too-thick web, and pressing flanges on the holes, keeps the web of I-beams light.
Other flight hardware features show up. The astrogator’s footrest is just a light tube. No need to have big, thick footrests in free fall. The blister of the window has a thick ring around it, to manage the extra stress and strain the blister puts on the crew sphere. The blister and ring have a structure to spread the load out into the membrane of the crew sphere. The crew sphere would probably be very thin, as von Braun only has an interior pressure of 9 psi.
One important aspect: the astrogation platform is mounted on a column running the axis of the crew sphere. Precise, accurate, repeatable, angle measurement would require as little vibration as possible, and as rigid a location on the moonship as possible. Just bolting the platform to the deck would cause precision killing vibration, and wouldn’t be accurately located relative to the rest of the moonship.
Even today, optics engineers want statically determinate mounts for telescopes and mirrors and such, to eliminate or minimize misalignments from thermal strains or vibrations.
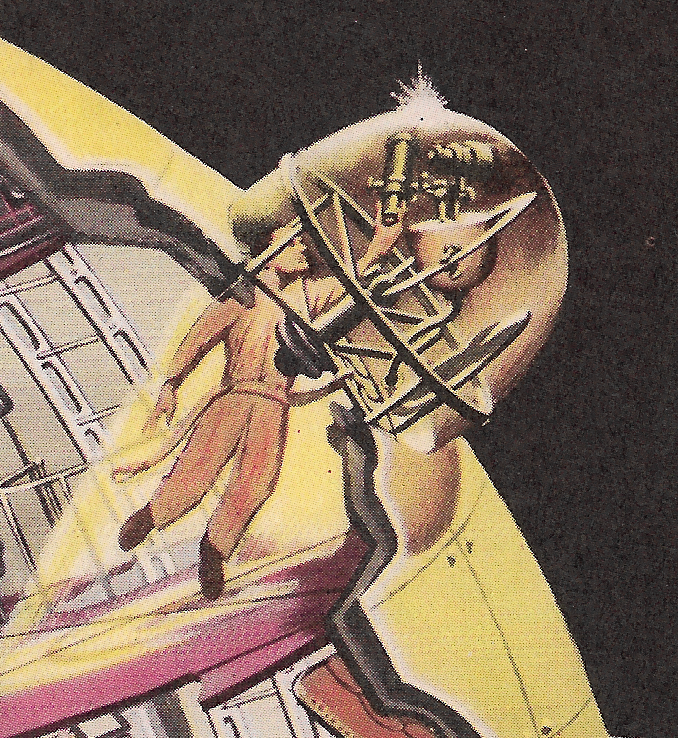
A close-up of the backup astrogator tending the devices that keep track of an “artificial horizon”. The devices aren’t as rigidly attached to the rest of the ship, but the artist still paid attention to a mounting frame, attached to the inner skin of the crew sphere. This excerpt clearly shows the two-layer construction that von Braun chose to protect against micro-meteoroid strikes. There is an oversight. Where’s the structure to transfer loads from the smaller astrogation blister into the sphere’s membrane?
Von Braun describes orienting the moonships via reaction wheels, although he calls them “flywheels”. Orienting a large vehicle via reaction wheels would be painful and slow. You’d design the astrogation platform to have the ability to orient itself to some set of 3 stars making nice X, Y and Z directions, as backup, or added precision, to the artificial horizon tracker. Then the astrogator would sight the earth or the moon to get a direction relative to the artificial horizon. The orientation of the moonship as a whole relative to the astrogation platform is known, courtesy of the mounting column. A few calculations with a “computer” that used mechanisms like the US Navy Mark 1 Fire Control Computer and the astrogator would know if the ship was on course or not.
Real Astrogation
The early 1960s Gemini spacecraft had hand-held sextants, sometimes mounted to windows, but the documentation is offline and scarce. As I read what little is on line, Gemini astronauts used the sextant at first experimentally, and then later to actually do orbital maneuvers.
The Apollo spacecraft had optical units (also here and here ) but used a digital computer and an inertial measurement unit to do the whole X,Y,Z orientation of the spacecraft as a whole. That illustrates what 10-15 years of progress in electronics, computation, and automation accomplished.